

Robótica y Big Data para la agricultura de precisión
INTRODUCCIÓN
La agricultura de precisión es un enfoque para el diseño y control de las operaciones agrícolas y se ha aplicado en gran medida en los sectores de producción de los cultivos. Se considera que forma parte del manejo de las granjas y se centra específicamente en el control de los insumos basado en el monitoreo intensivo del proceso de los cultivos.
El objetivo es maximizar la productividad espacio- temporal del cultivo dadas las limitaciones con las que se enfrenta la agricultura moderna y bajo la gobernanza de un modelo económico holístico de la granja. De esta manera, se optimiza la eficiencia de los recursos, mientras que el potencial genético se puede realizar mejor.
En el campo de la producción ganadera, la investigación y el desarrollo de la agricultura de precisión (PLF) está siendo impulsado por demandas similares observadas en los sectors de producción de cultivos, pero con la complejidad adicional de defender el bienestar animal como parte de una producción animal sostenible y productiva.
En los últimos años hemos visto un notable desarrollo en tecnologías para monitorear diversos indicadores de productividad, salud y bienestar animal a nivel individual y de grupo. La PLF ha surgido con el objetivo de vincular estos indicadores con tecnologías como sensores, software de análisis y visualización de datos y la robótica, de una forma que permita a los ganaderos gestionar de manera sostenible sus prácticas agrícolas. Al hacer esto, no hay duda de que otras partes interesadas en la cadena de valor también pueden estar implicadas de manera positiva. Por ejemplo, la genética animal y los fabricantes de piensos pueden utilizar la información proveniente de estas tecnologías para mejorar los insumos para el sistema agrícola y ayudar a los productores a equilibrar el objetivo de la eficiencia, el bienestar y el impacto ambiental.
Aquí presentamos los principios básicos que sustentan la innovación de los sistemas de detección, el manejo de grandes cantidades de datos generados para el monitoreo de los animales y las posibles tecnologías que pueden abordar las necesidades del sector avícola en el futuro. También se presenta la aparición de sistemas robóticos que tienen el potencial de apoyar mejor a los avicultores de manera espacio-temporal.

POTENCIAL DE LA PLF Y SUS HERRAMIENTAS EN LA ACTUAL PRODUCCIÓN AVÍCOLA
El principio básico de los sistemas PLF es medir continuamente las respuestas de los animales de forma directa en vez de indirectamente del entorno que los rodea. Mejorar los ojos, los oídos y tal vez la nariz de los agricultores mediante el monitoreo de los animales solo es posible de forma directa y totalmente automatizada, 7 días por semana, las 24 horas al día y 3600 segundos por hora. Al acumular estas respuestas se puede conocer una información interesante sobre el bienestar y la salud del animal. Las tecnologías modernas, como el control ambiental y los programas financieros, ya miden una serie de parámetros en la granja, aunque la tecnología PLF permite que el animal sea la preocupación central.
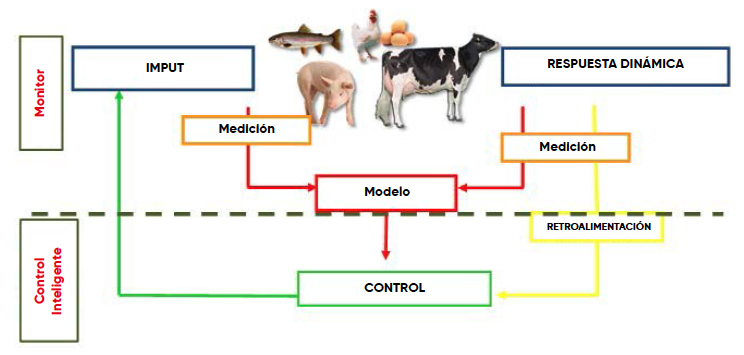
Fig. 1: Esquema básico de la Ganadería de Precisión (Berckmans, 2006)
El criterio clave para medir las respuestas de los animales es realizarlo de una manera firme y rentable. Esta es la razón por la que los sensores como cámaras y micrófonos son muy útiles pues como no hay un contacto físico con el animal no hay riesgo de influir en él.
El costo para el agricultor también puede ser mínimo ya que muchos animales pueden ser monitoreados usando un pequeño número de sensores.
Por otro lado, los sensores portátiles también brindan la oportunidad única de estar conectados al animal, de modo que ningún comportamiento pase desapercibido. Además, si bien la aplicación de sensores y los sistemas de TIC (*) que la acompañan es una parte central de la ganadería de precisión (PLF), todavía hay más espacio para avanzar en robótica para eliminar las tareas monótonas simples de las manos del productor avícola. Al hacerlo, éste puede centrarse en otros aspectos de su negocio, así como en mejorar los estándares de manejo de sus animales. Además, a través de la adopción de robots, el papel del productor puede cambiar ya que los robots dan la oportunidad de que su tiempo se use de manera diferente.
Esta revisión cubrirá brevemente las tecnologías de PLF, incluido el potencial de la robótica móvil para monitorear y administrar las instalaciones avícolas.
(*) ICT: Abreviatura, en inglés, de “Information and Communication Technology”
EJEMPLOS DE ANÁLISIS DE DATOS SOBRE EL COMPORTAMIENTO DE LAS AVES
Se ha demostrado que el monitoreo continuo basado en cámaras del comportamiento de las manadas de pollos es un medio para detectar problemas diarios en las grandes manadas. Por ejemplo, el comportamiento anormal de las manadas de pollos se puede detectar utilizando algoritmos para medir el patrón de ocupación de los mismos con un pronóstico de lo que debería ser en diferentes momentos del día. Y también se ha demostraron que, en base a esta actividad y el monitoreo de la ocupación, existe una correlación entre las desviaciones de la misma y dos importantes problemas refrentes al bienestar, las lesiones plantares y las quemaduras de tarsos porque ello indica que las aves que tienden a agruparse durante un período de tiempos más largo se enfrentan un mayor riesgo de infección en las mismas. Esto se corresponde con una observación previa de que los pollos menos activos criados sobre una cama en mal estado pueden empeorar este tipo de lesión.
Pero aún se ha trabajado más sobre el empleo de otras variables derivadas de imágenes, como el flujo óptico, para rastrear las desviaciones del comportamiento de las manadas, lo que implica características de los patrones generales de flujo del movimiento de las aves, que se ha demostrado que están correlacionados con los indicadores de salud y bienestar.
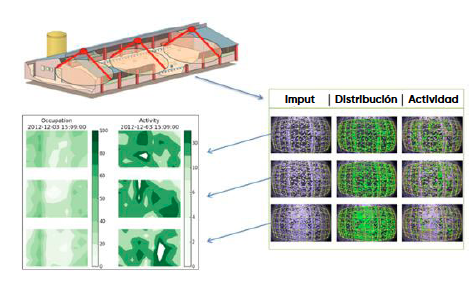
Fig. 2 Aplicaciones diferentes de la misma solución basada en cámaras para el monitoreo del comportamiento de las aves. A la izquierda, herramienta para el análisis de la calidad del sueño de las gallinas y a la derecha, monitoreo del bienestar de los pollos.
La misma tecnología de cámara se puede aplicar para el monitoreo del comportamiento de las gallinas al haberse desarrollado recientemente una herramienta basada en ello para ayudar a estimar el nivel de infestación del ácaro rojo (PRM) de las aves, en las naves. Este ácaro representa una amenaza para la producción de huevos y su control es muy difícil ya que tiende a esconderse en las grietas de los gallineros durante el día, aunque es activo durante la noche para ir a alimentarse de la sangre de las gallinas
Debido a que el PRM infesta el plumaje de las aves, al irritar a las gallinas éstas muestran un comportamiento inquieto durante la oscuridad, lo que se ha podido identificar para luego relacionarlo a través de algoritmos de visión por computadora. Como se ve en la figura 2, se crea un mapa de calor bidimensional y, a su vez, se utiliza para extraer una característica que refleja la calidad del sueño de las aves, pudiendo utilizarse luego los resultados como una herramienta de monitoreo que indica los niveles de infestación del parásito.
SISTEMAS AUTOMATIZADOS PARA EL SEGUIMIENTO Y MANEJO DE LOS BROILERS
Aunque se ha trabajado mucho para mejorar el rendimiento de las patas de los broilers, ello ocupa bastante tiempo y pese a que la genética está mejorando, todavía se necesita mucho trabajo para manejar el problema en las granjas. Una solución es a través de la alimentación para que el crecimiento compensatorio pueda controlarse activamente para que el peso de las patas de los pollos aumente de acuerdo con su desarrollo físico. En comparación con la alimentación ad libitum podría ser interesante controlar activamente la variación del crecimiento (el peso en función del tiempo) de los pollos de una forma más económica para reducir la mortalidad y los problemas de patas. Un aspecto clave de tal proceso de control es el modelo de trayectoria de crecimiento, que se puede construir cuando se conoce la ingesta precisa de pienso por ave así como el peso de los pollos.
La relación dinámica entre el input de la alimentación y el output del proceso se puede determinar y utilizar para predecir la respuesta dinámica del peso al suministro de pienso. Y sobre la base de esta predicción, se puede calcular la cantidad de pienso que se requiere para obtener una determinada respuesta de peso. Los trabajos de Aerts y col. (2003) han demostrado que un controlador basado en modelos en tiempo real de este tipo es capaz de realizar una trayectoria deseada de crecimiento en los broilers.
ESTIMULACIÓN DE LA ACTIVIDAD DE LOS POLLOS
Un medio para manejar la alta incidencia de debilidad de las patas en los pollos actuales también se puede hacer favoreciendo una mayor actividad durante el crecimiento. Como todos los animales, los pollos están influenciados por su microclima por lo que un estimulador potencial de su actividad es cambiando su entorno. Esto, por supuesto, no es la única o la mejor opción de estimulación.
En un estudio de Youssef y col. (2015) se desarrolló un controlador que es capaz de manipular, espacialmente, el nivel de actividad de los pollos dentro de una cámara ventilada prestando atención a la mayoría de las restricciones (por ejemplo, la limitación de los sistemas de calefacción y ventilación) y a los objetivos de control (por ejemplo, evitar los estrés por calor / frío al limitar las acciones de control dentro de las zonas termoneutrales de las aves).
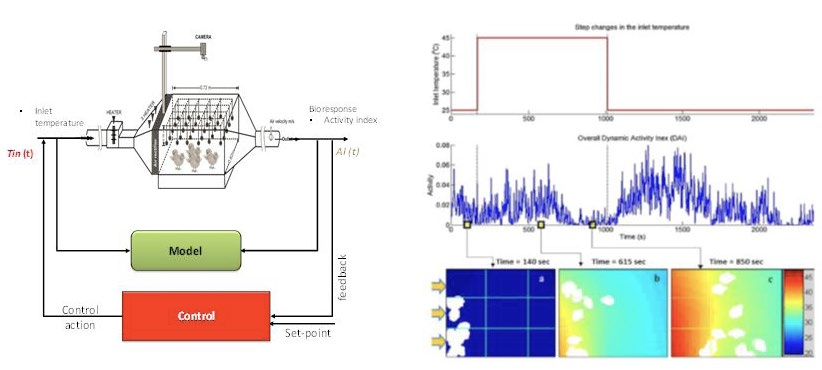
Fig. 3 Cámara de control ambiental para el control de la actividad de las aves y el esquema de control aplicado durante esta investigación, (izquierda) La respuesta de la actividad de los pollitos en la cámara bajo el input de la entrada en la temperatura (derecha).
La figura 3 muestra un ejemplo de las respuestas conductuales de las aves dentro de la cámara a un aumento escalonado en la temperatura de entrada de 25 ºC (la potencia del calefactor es mínima) a 45 ºC a un nivel de ventilación constante de 4,5 m3/h. A baja temperatura ambiente (25 ºC) las aves ocuparon las zonas más cercanas a la fuente de calor, tendían a acercarse entre ellas y mostraban una baja actividad general en la cámara. Durante la fase transitoria, cuando la temperatura ambiente comenzó a aumentar, los pollos comenzaron a mostrar un aumento en su actividad general y se separaron entre ellos. En el estado estacionario, la temperatura del aire ambiente en las zonas cercanas a la fuente de calefacción había alcanzado un nivel alto (>41 ºC) haciendo que los pollos se alejaran de ellas (con una constante de tiempo promedio de 0,25 a 4,2 min) y entre sí. Esta investigación muestra que puede ser posible controlar la actividad.
ROBOTS MÓVILES PARA UN MANEJO AUTOMATIZADO DE LOS GALLINEROS
La robótica ya está presente en el sector de la producción avícola desde hace muchos años. Un ejemplo de un proceso robótico en el sector actual de la producción huevera en baterías es el empleo de cintas transportadoras integradas para la recogida y transportar de los huevos a la sala de clasificación y embalaje.
Además, en los últimos años hemos visto la introducción de vehículos autónomos que son capaces de moverse por todo el gallinero, monitorear el medio ambiente y realizar una serie de tareas, con tienen el potencial de ahorrar tiempo al productor.
Algunos ejemplos son:
- Monitoreo de la calidad de la yacija para evitar que en caso de estar muy húmeda ello pueda comprometer la salud y el bienestar de las aves. La oportunidad para un sistema robótico es muestrear su calidad para acondicionarla cuando se detectan costras o una saturación de humedad.
- Monitoreo de comportamiento anormal: de los pollos, como importante indicador del bienestar, que actualmente se evalúa a través de la «puntuación de la marcha» mediante observación humana. La oportunidad para la robótica es monitorear el movimiento de las aves para cuantificar su capacidad para caminar mediante la evaluación de la interacción del robot con el pollo
- Detección de los pollos muertos, una tarea que debe realizarse a diario y no es agradable para ningún criador. Las tecnologías robóticas ahora se están llevando al mercado con la aplicación de la detección de aves muertas en mente.
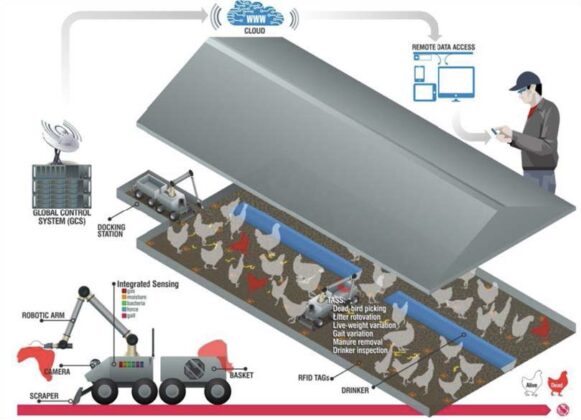
Actualmente hay un pequeño número de soluciones robóticas, cada una de las cuales proporciona un conjunto bastante específico de aplicaciones con su propia y única propuesta de valor. En el futuro, la perspectiva de plataformas robóticas modulares, como la conceptualizada en la figura 4, que permita realizar diferentes aplicaciones con la misma unidad podría generar oportunidades interesantes para el avicultor en el futuro.
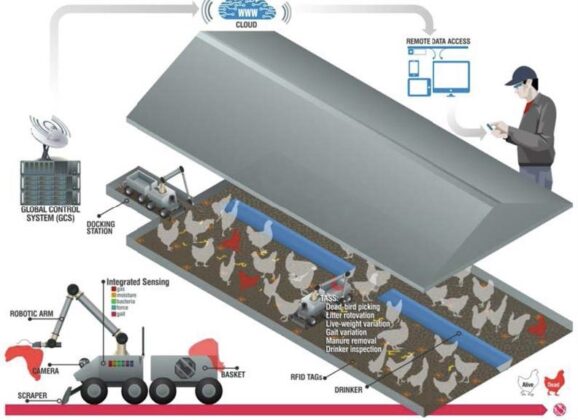
Fig. 4 Concepto para la avicultura de apoyo robótico del futuro
CONCLUSIONES
El desarrollo de PLF a partir de un concepto hacia una oportunidad viable para los avicultores ya ha comenzado. Los sistemas PLF están disponibles en los productos y se están poniendo en funcionamiento en las granjas comerciales. El reto clave no es la innovación de la tecnología, sino el descubrir cómo estas tecnologías pueden crear valor para los animales y los agricultores.
La ventaja fundamental es que los sistemas PLF están monitoreando continuamente y los 7 días de la semana y las 24 horas del día. Esto es mucho más de lo que cualquier agricultor u observador humano puede esperar hacer sin la ayuda de la tecnología. Otras formas en que los sistemas PLF pueden crear valor incluyen el ahorro de tiempo de trabajo y de tiempo en la detección de problemas, favorecer un menor estrés para los productores, resolver inmediatamente los problemas en el lugar en vez de más tarde, ofrecer un reconocimiento social al criador, cuantificar lo que sucede a los animales, etc.
Si bien es evidente que existen oportunidades para las aplicaciones basadas en sensores y datos, debe realizarse una colaboración multidisciplinaria y multisectorial para que estos sistemas se conviertan en herramientas de apoyo útiles en el campo. Lo más importante es que las necesidades del productor solo pueden representarse plenamente si el mismo forma parte del proceso de innovación.

THOMAS NORTON
XXVI Congreso Mundial de Avicultura. París, agosto 2022
[wbcr_php_snippet id="90268"]